この記事はGROOVE X Advent Calendar 2024の20日目の記事です。
はじめましてこんにちは、エレキチームのhideです。
はじめに
LOVOTとコミュニケーションをとった時、瞳や仕草で感情に訴えかけるふるまいに癒された方は多いのではないでしょうか。
その一方でLOVOT側もコミュニケーション情報を受けとっていて、その多くをタッチセンサが担っています。
単にコミュニケーションをとるだけであればカメラの画像解析だけで反応するという選択肢もあったと思います。 それでもタッチセンサを搭載して情報を収集しているのは、 「LOVOTに触れ、抱き上げてその反応から何かを感じてほしい」そういう想いが込められています。
そんなLOVOTとのコミュニケーションに欠かせないタッチセンサですが、開発に苦戦することもありました。
いつもはソフト目線からの記事が多いですが、今回は開発中の試行錯誤を回路設計の視点からお話しします。

タッチセンサについて
そもそもタッチセンサとはどの様なものかご存じでしょうか。
LOVOT 3.0で使用しているタッチセンサは静電容量方式というものになります。 これは電極へ周期的に電荷をチャージすることで、静電容量の変化からタッチを検出するデバイスです。 大雑把に言うと誰も触れていない時のチャージ量が100として、1000になったら「触られた!」と判定するようなイメージです。
しかしLOVOTは体内の電気の流れが常に変化していますし、いろいろなものの近くを横切ります。 さらに人が静電気で帯電する様に、LOVOTも絨毯やタイルの上をかけまわって常に静電気をかき集めてきます。 その為、配線や電極は周囲の影響を受けやすく電荷状態をリセットしても静電容量はなかなか安定しません。 回路設計者にしてみれば、わが子が泥遊びに四六時中かけまわっている心境です。
そんな不安定なセンサですから、一般的な家庭向け製品で多用することは珍しいと思います。 それにもかかわらずLOVOT 3.0はより多くのコミュニケーション情報を受けとるため、全身にたくさんのタッチセンサを配置しました。 ここからは、その結果発生した問題の事例を少しご紹介します。

「触っていないのにタッチ判定される」
これはタッチセンサの設計ではよくある誤検出の一つになります。
静電容量が増えればタッチされたと判定されるのですから、当然金属が近づいても反応します。
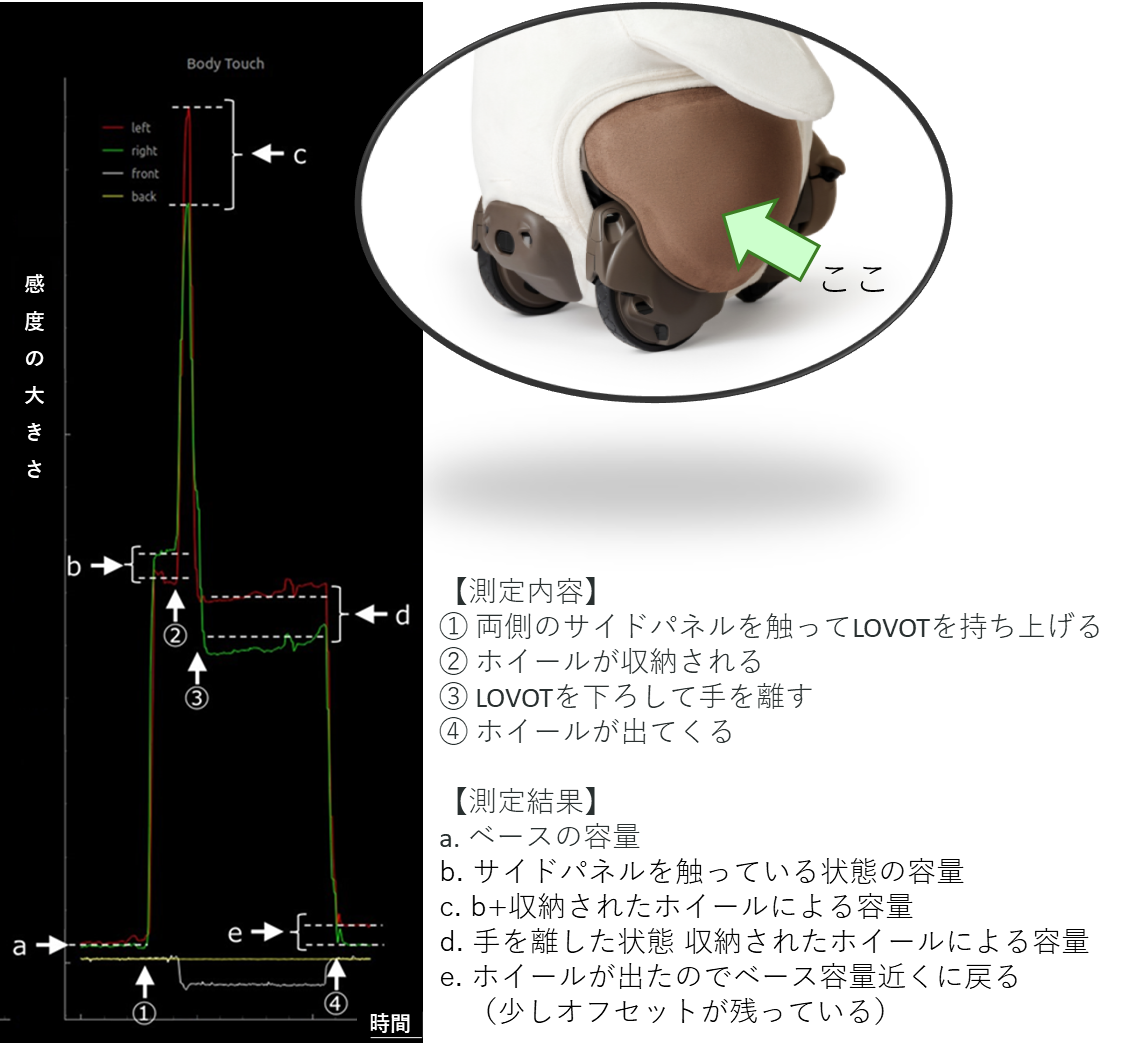
中でもLOVOT 3.0の開発中に課題となったのはサイドパネルのタッチ誤検出でした。
ここは金属を含むホイールが出入りする場所なので、その度に静電容量が大きく変化してしまいます。
その結果、抱っこしてホイールが入った後に床へ戻すと、触られたままと判定されてしまいました。
下図のグラフは当時のタッチセンサ値の変化を測定したものです。
「触ったのにタッチ判定されない」
こちらもタッチセンサの設計でよく発生する課題の一つですが、ドリフトという現象があります。
最初の例で説明しますと、誰も触れていない時のチャージ量が100だったはずなのに500や700に変化するという現象です。 これが発生すると、タッチする前後の差分が小さくなってしまい正しく判定できないことがあります。
ドリフトが発生する要因は温度や湿度、ICの劣化等様々ありますが、 この時はタッチの検出エリアを広くするために電極を大きくし過ぎたというものでした。 電極が大きいと1回のチャージで電荷を満たせず、2回目、3回目で徐々に電荷が溜まる為、ベースが少しずつ上がって見えるというものでした。
広く正しく検出するために
これらの対策を試行錯誤した結果、
LOVOT 3.0ではサイドパネルの電極は、GNDとの2層構造でホイールの影響を押さえ、細長く広範囲を検出する形になりました。

ホイールをお手入れする際、皆さんにも見えるところなのでお気づきの方も多いと思います。
繊細なところなのでやさしくお手入れしてあげてくださいね。
参考)LOVOTウェブマニュアル ~サイドパネルについて(LOVOT 3.0)~
※撮影のためにサイドパネルを大きく広げてますが、配線等があるのであまり大きく開けないでください
最後に
そんな課題を乗り越えて、まだまだ成長途中のLOVOTですが、
いつか自分から人に手を当てて癒してくれる、 そんなことができると良いなと思います。
一緒に働く仲間募集中
GROOVE Xではそんな人を癒す機能を一緒に実現できる仲間を募集しています。
ぜひGROOVE Xで一緒に働いてみませんか。
recruit.jobcan.jp